(C:)
(C:) Design
Design Redbull racing
Redbull racing Racing drone
Racing drone Simple Irrigation System
Simple Irrigation System Rick & Morty Portal Gun
Rick & Morty Portal Gun USO
USO Spidy
Spidy FAJA
FAJA SOCIUS
SOCIUS
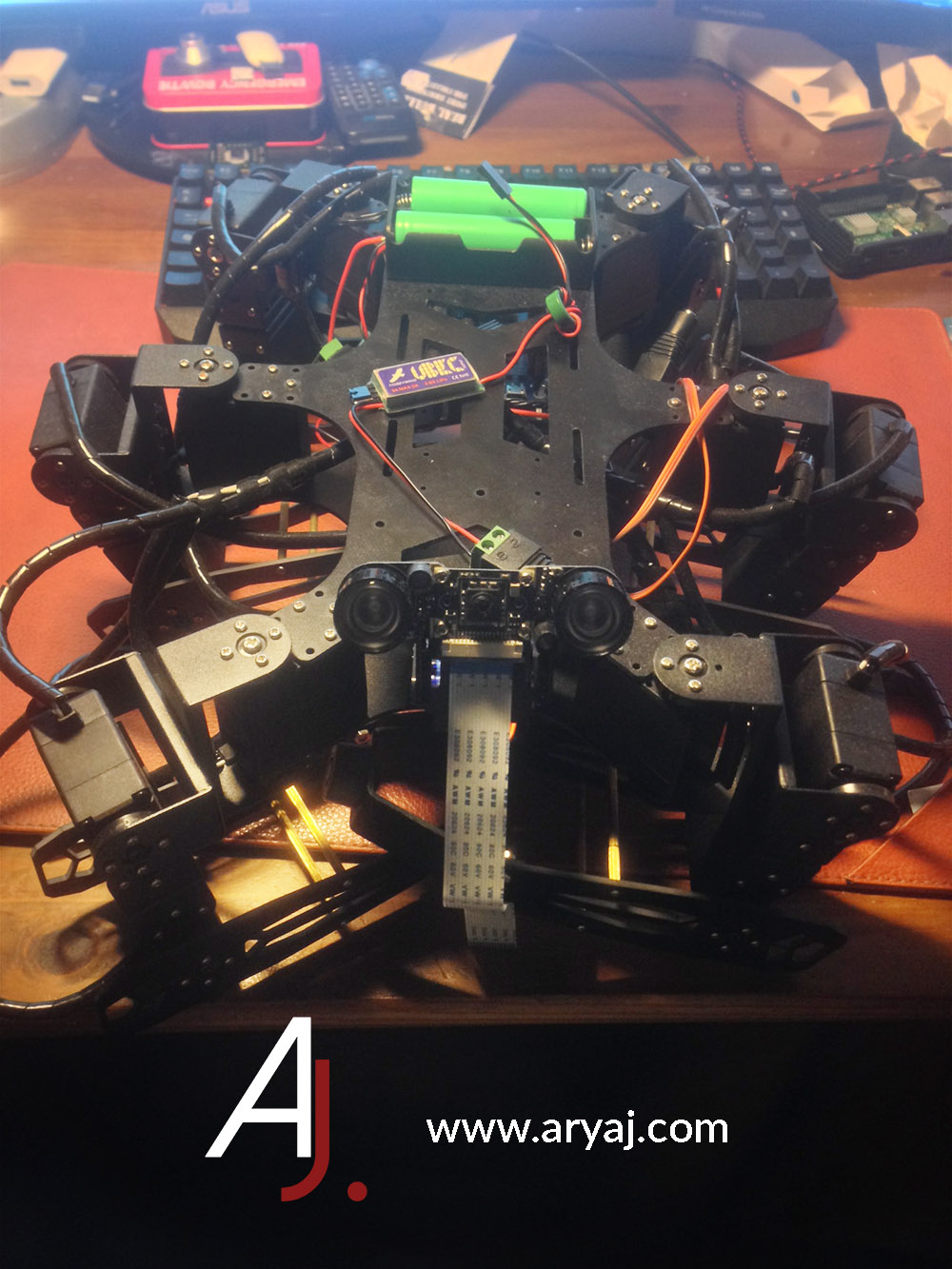
USO - Hexapod Robotic Spider
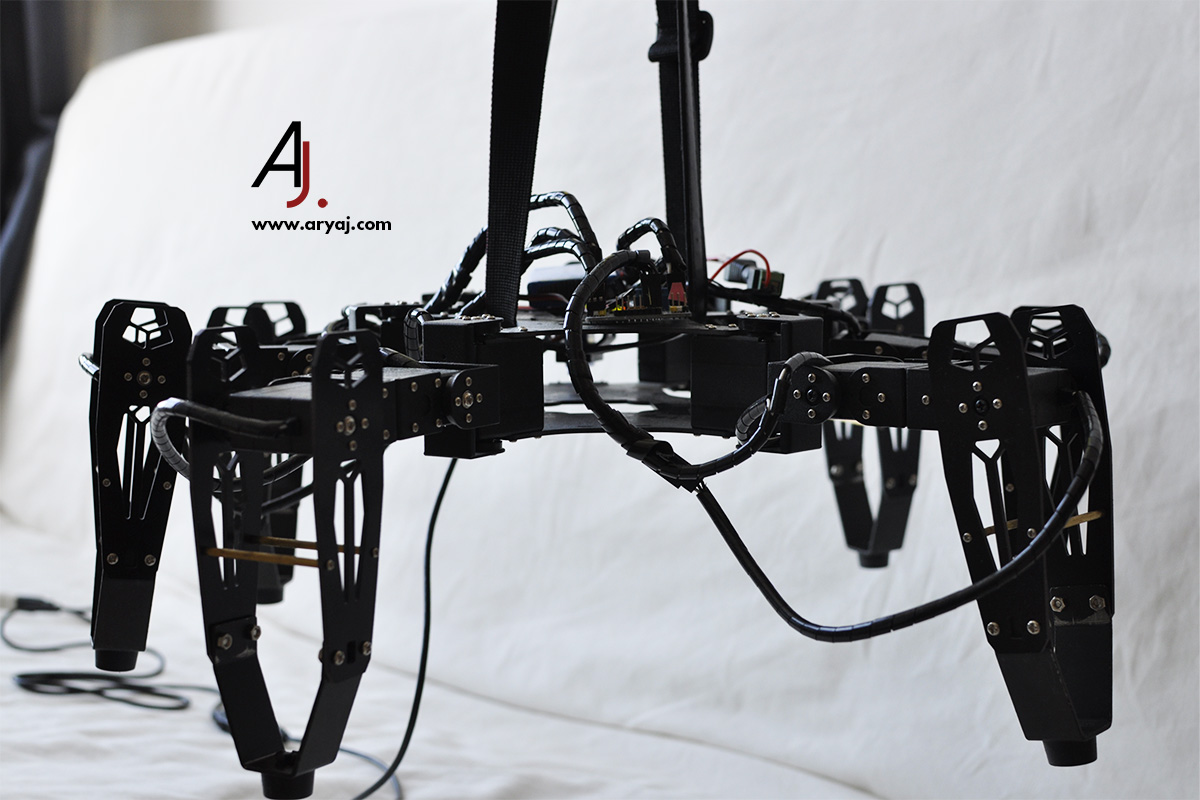
I wanted to challenge myself and program a hexapod robot from scratch. I find it cool and interesting to do that on my own. I knew that implementing the control of 18 motors simultaneously would be hard and I wanted to see if I was able to do it.
The Hexapod robot can walk on an unpredictable surface and is stable. I included a pan and title support for the camera and a live stream to a ground station.
This was programmed in C++ only.